Embedded Rust, Radio Astronomy, and a New Driver Crate
It's been a while since I tried experimenting with embedded Rust. About two years ago, I tried to do something nontrivial (DMA from an ADC) on a supposedly well-supported STM32 chip with very little success. Both the peripheral access crate (PAC) and hardware abstraction layer (HAL) were nowhere near production ready.
But now it's 2022 and the Rust community has been chugging along and I was in the mood to check in on their progress.
For context, I'm working on a radio telescope project, the Galactic Radio Explorer (GReX). One of the fundamental building blocks in this system is a board to filter, amplify, and downconvert the 1.4 GHz signal from the low noise amplifier (LNA) to a power range and frequency that best suits the analog to digital converters on the digitization board we're using. I'm calling this device the frontend module, or FEM. As this system will be distributed all over the world, we need to be able to monitor and control the system with high reliability.
That's where Rust fits in. There is a microcontroller on this board that controls the power supplies for the LNAs and digital attenuators as well as monitoring temperature, output RF power, and voltages and currents. This code needs to be extremely robust - which fits in nicely to Rust's compile-time guarantees. Also, Rust is a modern language - something that the embedded scene doesn't really see a lot of. That means there is a real package manager, nice functional conveniences, and a plethora of nice tooling.
Embedded HAL Magic
One of the missing pieces in the design was a Rust driver for the particular DC power monitoring chip I wanted use, the PAC1944. I chose this chip because it was:
- In stock
- Small
- I2C
- Covered the voltages I care about
As far as I could tell, there aren't any Rust driver crates that cover a device like this, so I thought this would be a nice opportunity to contribute to the community.
For those who don't know, the embedded Rust community has organized a set
of generic "traits" that abstract the basic functionality of core features of
embedded systems called the embeddedhal.
The objective is that this
allows for authors to write libraries that target these traits instead of any
specific implementation to allow the drivers to be generic. This means that this
driver will work on any system that has embedded-hal implementations,
including most/all microcontrollers, some embedded linux platforms, other
bare-metal systems. This saves us from so much code duplication as writing code
that reads from say a temperature sensor on a raspberry pi can use the same
library for that sensor that you would use on an Arduino.
Mapping Registers in Rust
Writing this crate was pretty straightforward, as it more or less just maps reading/writing registers over I2C to Rust data structures. There is a fantastic library called packed_struct that makes translating from a datasheet's register mapping very simple.
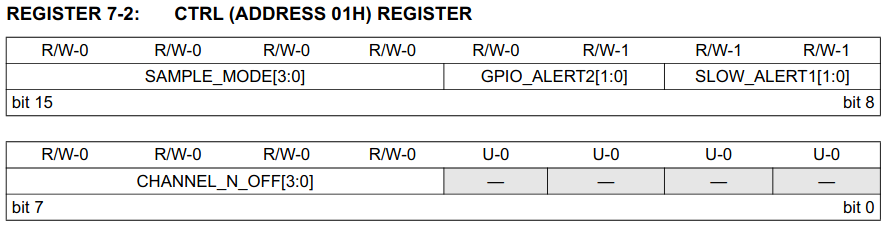
For example, take the first register in the datasheet, CTRL. It contains a
four-bit register to select the sample mode, two sets of two bits to control the
behavior of the alert pin, and four flags to turn on and off any of the four channels.
Those settings for the sample mode and pin mode are simple enums:
#[derive(PrimitiveEnum_u8, Clone, Copy, Debug, PartialEq)]
pub enum SampleMode {
_1024Adaptive,
_256Adaptive,
_64Adaptive,
_8Adaptive,
_1024,
_256,
_64,
_8,
SingleShot,
SingleShot8X,
Fast,
Burst,
Sleep = 0b1111,
}
#[derive(PrimitiveEnum_u8, Clone, Copy, Debug, PartialEq)]
pub enum GpioAlert {
Alert,
Input,
Output,
Slow,
}and the flags to select the channel is just a struct with explicit bits set:
#[derive(PackedStruct, Default, Debug, PartialEq)]
#[packed_struct(bit_numbering = "msb0")]
pub struct Channels {
#[packed_field(bits = "4")]
pub _1: bool,
pub _2: bool,
pub _3: bool,
pub _4: bool,
}then to put this all together I just make a struct for Ctrl that combines
these compound types. I have to explicitly state the packed number of bytes, the
bit ordering, and positions.
#[derive(PackedStruct, Debug, PartialEq, Register)]
#[packed_struct(size_bytes = "2", bit_numbering = "lsb0")]
pub struct Ctrl {
#[packed_field(bits = "15:12", ty = "enum")]
pub sample_mode: SampleMode,
#[packed_field(bits = "11:10", ty = "enum")]
pub gpio_alert2: GpioAlert,
#[packed_field(bits = "9:8", ty = "enum")]
pub slow_alert1: GpioAlert,
#[packed_field(bits = "7:4")]
pub channel_n_off: Channels,
}But that's literally all I need to do to go back and forth between a payload of bytes to a Rust data structure! In this same file, I added a simple test case to make sure the round-trip behavior is what is should be.
#[cfg(test)]
mod tests {
use super::*;
#[test]
fn round_trip_ctrl() {
let ctrl = Ctrl {
sample_mode: SampleMode::_256,
gpio_alert2: GpioAlert::Input,
slow_alert1: GpioAlert::Output,
channel_n_off: Channels {
_1: false,
_2: true,
_3: false,
_4: false,
},
};
let bytes = ctrl.pack().unwrap();
assert_eq!(ctrl, Ctrl::unpack(&bytes).unwrap());
}
}Macros and Addresses
This library uses procedural (proc) macros extensively to generate a ton of code
for us just based on annotations of the enums and structs. I wanted to use that
same interface to allow for easy access to the registers' address in memory. To
do that, I created an enum for Address that contained the same name as the
register struct and mapped it to the datasheet-specified address. Then (in a
separate crate), I wrote a quick little macro register_derive that allows me
to #[derive(Register)] on the struct and get an addr() method for free. I
could have used a non-procedural macro for this, but I also wanted the
experience of writing a proc macro :)
extern crate proc_macro;
use proc_macro::TokenStream;
use quote::quote;
use syn::{parse_macro_input, DeriveInput};
#[proc_macro_derive(Register)]
pub fn derive_register(tokens: TokenStream) -> TokenStream {
let input = parse_macro_input!(tokens as DeriveInput);
let name = input.ident;
let addr_impl = quote! {
impl #name {
pub(crate) fn addr() -> Address {
Address::#name
}
}
};
TokenStream::from(addr_impl)
}High Level Interface
Now that all the registers are mapped, we need a nice user-facing interface. Some of these are straightforward like the constructor of the instance of the device. This includes using an enum of the resistor value for the address selecting, so you don't need to look it up from the datasheet:
#[repr(u8)]
#[derive(Debug, Copy, Clone)]
pub enum AddrSelect {
GND = 0b10000,
_499 = 0b10001,
_806 = 0b10010,
_1270 = 0b10011,
_2050 = 0b10100,
_3240 = 0b10101,
_5230 = 0b10110,
_8450 = 0b10111,
_13300 = 0b11000,
_21500 = 0b11001,
_34000 = 0b11010,
_54900 = 0b11011,
_88700 = 0b11100,
_140000 = 0b11101,
_226000 = 0b11110,
VDD = 0b11111,
}
pub struct PAC194X<I>
where
I: i2c::Read + i2c::Write + i2c::WriteRead,
{
i2c: I,
address: u8,
}
impl<E, I> PAC194X<I>
where
I: i2c::Read<Error = E> + i2c::Write<Error = E> + i2c::WriteRead<Error = E>,
{
pub fn new(i2c: I, addr_sel: AddrSelect) -> Self {
Self {
i2c,
address: addr_sel as u8,
}
}
}Then, many of the methods are just reading and writing those registers we
defined. That would be a ton of code that is just the same thing over and over.
Here, we can use the macro_rules! "macro by example" to generate all that for
us. I wrote several for reading and writing, but this was the most interesting:
macro_rules! write_fn {
($var:ident: $type:ty) => {
paste! {
#[doc = stringify!(Writes out the $type register)]
pub fn [<write_ $var>](&mut self, $var: $type) -> Result<(), Error<E>> {
const PACKED_SIZE_WITH_ADDR: usize = core::mem::size_of::<<$type as PackedStruct>::ByteArray>() + 1;
let mut bytes = [0u8; PACKED_SIZE_WITH_ADDR];
bytes[0] = $type::addr() as u8;
$var.pack_to_slice(&mut bytes[1..]).unwrap();
self.block_write(&bytes)?;
Ok(())
}
}
};
}As the size of the particular register is known at compile time, and I need to
add the address of the register to the actual serialized payload, I can use a
const expr to parameterize the byte array. This is a little funky because I have
to cast the register type to the trait PackedStruct so I can extract the
associated type that has the const core::mem::size_of method defined. Super cool!
Lastly, the most obvious use case of this crate is to read the channel voltages, so it makes sense to have one high level method that just does that. For this, we need to read the register that control the range as that dictates the scaling factors of the numbers we get and then just return it!
pub fn read_bus_voltage_n(&mut self, n: u8) -> Result<f32, Error<E>> {
assert!((1..=4).contains(&n), "Channel n must be between 1 and 4");
let fsr_reg = self.read_neg_pwr_fsr_lat()?;
let fsr = match n {
1 => fsr_reg.cfg_vb1,
2 => fsr_reg.cfg_vb2,
3 => fsr_reg.cfg_vb3,
4 => fsr_reg.cfg_vb4,
_ => unreachable!(),
};
Ok(vbus_to_real(self.read_vbusn(n)?.voltage, fsr))
}where this function vsense_to_real performs that conversion based on the enum
variant of the range:
fn vsense_to_real(raw: u16, fsr: VSenseFSR) -> f32 {
0.1 * match fsr {
VSenseFSR::Unipolar => (raw as f32) / 65536.0,
VSenseFSR::BipolarHV => (i16::from_ne_bytes(raw.to_le_bytes()) as f32) / 65536.0,
VSenseFSR::BipolarLV => (i16::from_ne_bytes(raw.to_le_bytes()) as f32) / 32768.0,
}
}Integration and Testing
So, after completing the crate here, I added a ton of documentation and published to crates.io! Integrating in my firmware for the FEM was as easy as any other driver crate. I created the instance, attached the bus, and use it as normal. I ran into one bug where I got the endianness wrong of a few of the fields, but they are fixed now.
Pain Points
Overall, the embedded Rust experience has gotten a lot better. The tooling has improved, the ecosystem keeps getting bigger, and the HALs and PACs are stabilizing. Still, it's not perfect. I ran into a few issues in the process of all this, none of which had to do with the driver crate itself, but rather around the implementation of this non-trivial firmware.
First, it was not obvious how to share the I2C bus between driver crates. Most drivers (including the one we just wrote) take ownership of the bus. This means you can't pass it back to the caller without destructing (assuming you wrote a destructor that does that). I2C, as well as many other busses, are meant to be shared, which is pretty orthogonal to this idiomatic usage. After asking on the embedded Rust matrix, they recommended the shared bus crate, which worked a charm. It would be nice if this was more advertised as the solution to this problem as it took some digging to find.
The next problem was the particular chip I'm using wasn't supported by the HAL I
wanted to use. Specifically, I grabbed the "L-Variant" of the SAMD21E17, which
the folks over at atsamd-rs hadn't heard
of. This is just to show that even the "popular" PAC and HAL crates still have
blind spots in their device coverage. On the plus side, they wrote their crates
generically enough that it was simple to add the feature flags and cfg logic
to make it work.
Finally, the story with uploading firmware is still kinda a hot mess. I have a
JLink EDU, which supports the common SWD protocol. I tried knurling
tools's probe-run, but I
couldn't for the life of me get it to work. I ended up using
cargo-embed, which works fine. It's
strange though because probe-run is supposed to use the cargo-embed in the
backend. I opened an issue, but it hasn't gained much traction.
Closing
If you would like to check out the code for the frontend module, check it out on
github.
The code for the driver crate is here.
It's kinda funny because if you search for PAC194x, you get my crate as one of
the first few results. You're welcome Microchip.